|
Nektar++
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
Nektar++
|
#include <cstdio>#include <cstdlib>#include <SolverUtils/Driver.h>#include <LibUtilities/BasicUtils/SessionReader.h>#include <PulseWaveSolver/EquationSystems/PulseWaveSystem.h>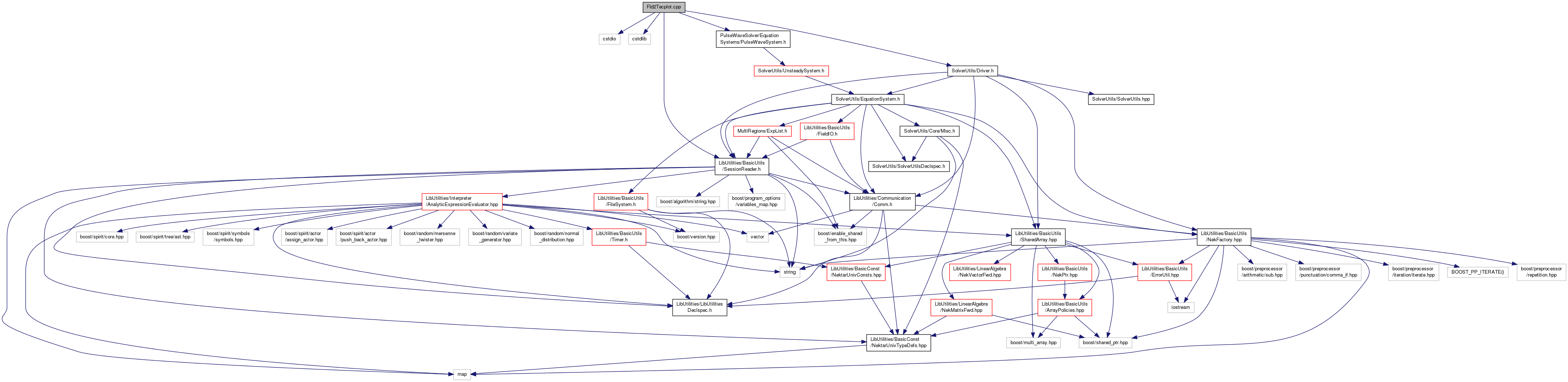
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
Variables | |
| static std::string | cvar |
| static std::string | SetToOneD = LibUtilities::SessionReader::RegisterCmdLineArgument("SetToOneSpaceDimension","1","Redefine mesh to be aligned to x-axis") |
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 17 of file Fld2Tecplot.cpp.
References ASSERTL0, Nektar::LibUtilities::SessionReader::CreateInstance(), Nektar::LibUtilities::NekFactory< tKey, tBase, >::CreateInstance(), cvar, and Nektar::SolverUtils::GetDriverFactory().
|
static |
Definition at line 12 of file Fld2Tecplot.cpp.
Referenced by main().
|
static |
Definition at line 15 of file Fld2Tecplot.cpp.
 1.8.1.2
1.8.1.2